Formation automatisme
-
Formules électrotechnique
- Le 29/06/2015
- Dans Electrotechnique
Petite fiche résumant quelques formules utilisées en électrotechnique

-
La machine-outil à commande numérique CNC : c'est quoi?
- Le 28/06/2015
- Dans Automatisme
La machine outil à commande numérique CNC ou computer numerical control en anglais est un machine-outil dotée d'une commande numérique assurée par un ordinateur.De nos jours,elle est très utilisée dans le domaine de la fabrication mécanique.

Le fichier de définition numérique (qu'on appelle aussi
DFN, définition numérique, numérisation ou même tout simplement « num ») est un fichier informatique généré par CAO, qui remplace de plus en plus le plan sur la traditionnelle planche à dessin.CATIA est actuellement l'un des logiciels deCAO, "Conception Assistée par Ordinateur", les plus utilisés pour établir les DFN dans les domaines de l'automobile et de l'aéronautique.Sur ces définitions doivent ensuite être calculés des parcours d'outil au moyen de logiciels de FAO.Ces parcours sont alors traduits par un logiciel dit "post-processeur" (généralement adosssé au logiciel de FAO) dans un langage compréhensible par la « commande numérique » et appelé : langage de programmation. On parle de programmation de commande numérique. En usinage, ce langage de programmation obéit, pour une part, à la norme ISO 6983 (RS274D, 1980). il existe cependant d'autres standardisations plus récentes (par ex. STEP-NC).Les commandes numériques sont utilisées pour faire des tournages,fraisages et rectifications de pièces.
-
Comment fabriquer une alimentation électrique ou chargeur pour son téléphone?
- Le 28/06/2015
- Dans Electronique
Une alimentation électrique est un dispositif électronique capable de fournir de l'électricité à des appareils électriques que ça soit de l'alternatif ou du continu.Dans cet exemple on va voir comment est conçu une alimentation alternatif/continu servant à alimenter ou recharger des appareils comme les smartphones ou tablettes tactiles.
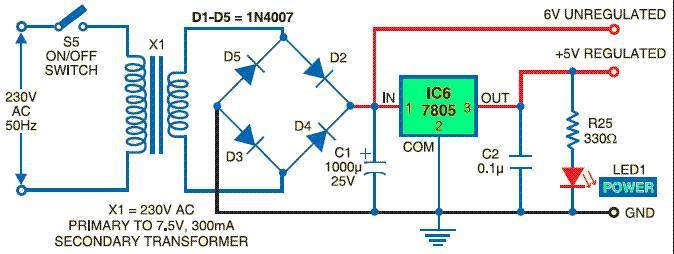
Les différents composants sont:
- Un transformateur abaisseur : abaisse la tension de 230v à 7,5v
- 1 pont de diodes (4 diodes 1N4007) : redresse la tension abaissée par le transformateur
- 1 régulateur de tension (le 7805):assure une tension fixe à la sortie quelque soit l'entrée
- Des condensateurs de filtrages pour lisser les tensions de sorties
Un autre paramètre à prendre en considération,le courant délivré par le régulateur de tension à consulter dans le Datasheet du composant,afin d'avoir un courant adapté pour son appareil.
-
Comment lire la plaque signalétique d'un moteur ?
- Le 28/06/2015
- Dans Electrotechnique
Il existe plusieurs façons de connaître les caractéristiques propres d'un moteur :
-
Les capteurs de température industriels : RTD,thermocouple
- Le 27/06/2015
- Dans Automatisme
Aujourd'hui,on va parler des capteurs de température industriels.En effet que ce soit dans les systèmes automatisés de type discrets comme dans les industries manufacturières (agro-alimentaires,logistiques) ou dans les industries de procèdés comme dans les industries chimiques,pharmaceutiques et pétrolières,les capteurs de température sont souvent utilisés afin de contrôler la température des matières premières pendant leur transformation.
Dans le monde industriel,on rencontre principalement deux catégories de capteur de température : les capteurs de température qui fonctionnent par variation de résistance et les capteurs de température qui fonctionnent par variation de tension.Parmi les capteurs de températion à variation de résistance,nous avons la sonde RTD et la thermistance et pour les capteurs de température qui fonctionnent par variation de tension,nous avons le thermocouple.La sonde de température Pt100 ou Pt1000 très utilisée dans le monde industriel est un capteur de température de type RTD (agit par variation de résistance).Par exemple pour la sonde Pt100,la résistance varie entre 0 et 100 ohms.Les sondes Pt100 se présentent sous diverses formes dépendant du type d'application.On distingue deux classes de sonde Pt100 : les sondes Pt100 de classe A et les sondes Pt100 de classe B.Les sondes Pt100 de classe A ont une plage de mesure pouvant aller de -100 degré à + 450 degré Celsius avec une sensibilité de +/- 0,35 degré Celsius.Les sondes Pt100 sont disponibles en plusieurs types : 2 fils,3 fils ou 4 fils.(Voir ci-dessous l'image d'une sonde Pt100)

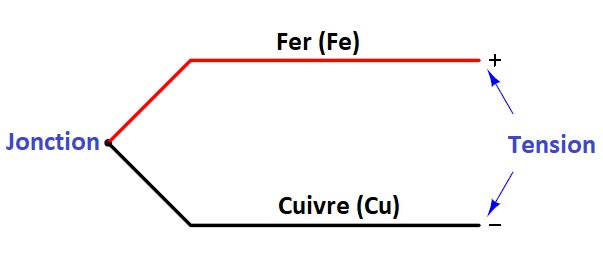
Les thermocouples
Si vous êtes automaticien instrumentiste,vous avez surement rencontré ce type de capteur dans votre carrière.Les thermocouples sont des capteurs de température rapides qui fonctionnent par variation de tension.Il existe plusieurs types de thermocouple avec des gammes et tolérances de température différentes.Basiquement,le thermocouple est un thermomètre et est utilisé pour les gammes de températures très élevées ou très basses.Il est appelé thermocouple, car il fonctionne par couplage de deux matériaux différents ayant des propriétés thermoélectriques différentes.Lorsque deux fils de matériaux différents sont joints à une extrémité et que cette extrémité est soumise à un flux de chaleur, on peut mesurer un potentiel de tension aux bornes des extrémités ouvertes.Ce potentiel est appelé tension Seebeck en l'honneur du scientifique qui a fait cette découverte.
La relation entre la tension du thermocouple et sa température n’est pas linéaire,il est donc nécessaire d’utiliser des tables de conversion pour déterminer la température à partir de la tension mesurée.
Les thermocouples ont leurs avantages et leurs inconvénients.Les principaux avantages d'un thermocouple sont la simplicité,la nature robuste du dispositif et la large gamme de températures supportée.Il existe plusieurs types de thermocouples ayant chacun une plage de température qui lui est propre (type B,C,E,T etc..).Les thermocouples sont moins sujets aux défaillances dues aux vibrations et peuvent également être fixés mécaniquement, même soudés, à l'unité pour laquelle la température doit être mesurée.
Les thermocouples peuvent être utilisés avec un automate en utilisant un transmetteur,la valeur recueillie est de type analogique.Les thermocouples sont très utilisés dans les domaines de l'instrumentation et de la régulation industrielle.

Voici quelques-unes des applications les plus courantes , où le thermocouple est utilisé pour mesurer la température.
- Les brûleurs/fours (Exemple dans les cimenteries)
- Dans les usines de raffinage de pétrole
- Sur des chaudières industrielles -
Logiciel automatisme gratuit : Arch
- Le 27/06/2015
- Dans Automatisme
Arch est un logiciel destiné au développement rapide d'applications d'automatisme sur pc. Il permet la programmation en grafcet et en langage à contact (ladder).Il peut être utilisé pour gérer des interface d'entrées sorties usb pour automatiser toute sorte de machines ou de processus à partir de séquences grafcet et de réseaux logiques. Il peut également fonctionner en local à partir de bits internes dans un but pédagogique.
-
Logiciel calcul force de levage hydraulique
- Le 27/06/2015
- Dans Automatisme
Force de levage est un logiciel qui permet de faire des calculs de force en hydraulique industrielle.
vous pourrez calculer toutes les possibilités de levage en fonction de 5 paramètres :
de la pression du circuit hydraulique
de la force du vérin
du poids de la chèvre hydraulique
de la longueur de la flèche de la chèvre hydraulique
de la longueur des jambes de la chèvre hydraulique
vous pourrez calculer toutes les possibilités de forces hydrauliques, de volumétrie, de débit etc. En fonction de 4 paramètres :de la pression de la pompe du circuit hydraulique
du diamètre du piston du vérin hydraulique
ainsi que du diamètre du piston du vérin hydraulique
et la course du piston du vérin hydraulique -
Logiciel calcul hydraulique gratuit : Mecafluid
- Le 27/06/2015
- Dans Automatisme
Mecafluid est un logiciel de calcul d’hydraulique à surface libre, en régime permanent et à géométrie paramétrée, à double objectif d’utilisation : pédagogique, professionnelle.Il permet aux étudiants d'assimiler les concepts de base de l’hydraulique, en manipulant aisément les calculs et en visualisant les résultats. Pour les professionnels, il permet de dimensionner les réseaux d’aep et assainissement, ou vérifier sommairement des ouvrages et des écoulements dans des rivières ou des canaux en effectuant des calculs simples et rapides.